Optimizing patterns¶
In this tutorial, we will explain how to use Dr.TVAM to optimize patterns for printing.
🚀 We will cover the following topics:
How to setup the optimization
Implementing a basic optimization loop
Extracting and saving the results
We start once again by importing drtvam along with other packages:
[1]:
import drtvam
import mitsuba as mi
import drjit as dr
import numpy as np
import matplotlib.pyplot as plt
from tqdm import trange
1. Setting up the scene¶
Setting up Dr.TVAM for optimization is quite similar than what we showed in the previous tutorial, with a few exceptions. We will start again by describing the scene components. For clarity, we will reuse the same printing setup we described in the previous tutorial.
[2]:
scene_dict = {'type': 'scene'}
Container geometry¶
Container geometry is described as before:
[3]:
vial_params = {
'r_int': 5., # 10mm interior diameter
'r_ext': 5.5, # 11mm exterior diameter
'ior': 1.54, # Index of refraction of the vial
'medium': {
'ior': 1.5, # Index of refraction of the resin
'extinction': 0.1, # Extinction coefficient
'albedo': 0. # Purely absorptive
}
}
vial = drtvam.geometry.CylindricalVial(vial_params)
scene_dict |= vial.to_dict()
Projector¶
The projector can be initialized like previously, but we can also specify only the number and resolution of the patterns. In that case, all pixels will be initialized at 0.
🗒 Note
When matching a real printing setup, the projector allows you to specify its full resolution, as well as a crop resolution that defines the active area that will be optimized. It is sometimes necessary to do so the optimized resolution so that it fits the memory capabilities of the hardware used for optimization.
[4]:
scene_dict['projector'] = {
'type': 'collimated',
'n_patterns': 1000,
'resx': 128,
'resy': 128,
'pixel_size': 0.1,
'motion': 'circular',
'distance': 20.
}
Sensor¶
The sensor is defined as before:
[5]:
scene_dict['sensor'] = {
'type': 'dda',
'to_world': mi.ScalarTransform4f().scale(9),
'film': {
'type': 'vfilm',
'resx': 128,
'resy': 128,
'resz': 128,
}
}
Target¶
In order to optimize patterns, we also need to define the target surface, i.e. the shape we want to print. We do that by specifying a 3D mesh file to Mitsuba, either in PLY or OBJ file format. In this example, we will print the well-known 3DBenchy model.
Additionally, we must specify its scale and location in space, so that it fits within the printing medium. We will define a transform such that it is centered around 0, and is \(8\text{mm}\) long.
[6]:
target_mesh = mi.load_dict({
'type': 'ply',
'filename': 'resources/benchy.ply'
})
center = target_mesh.bbox().center()
scale = 8 / target_mesh.bbox().extents().z
scene_dict['target'] = {
'type': 'ply',
'filename': 'resources/benchy.ply',
'to_world': mi.ScalarTransform4f().scale(scale).translate(-center),
'bsdf': {'type': 'null'}
}
The scene is now ready for loading:
[7]:
scene = mi.load_dict(scene_dict)
We will also need an integrator, like in the previous tutorial:
[8]:
integrator = mi.load_dict({
'type': 'volume',
'max_depth': 3,
'print_time': 10 # 10s print
})
2. Optimization setup¶
In order to run the optimization, we need to define an objective function, a reference, and an optimizer.
Modifiable scene parameters are exposed via Mitsuba’s traverse mechanism, and the scene is updated by calling params.update()
[9]:
params = mi.traverse(scene)
params
[9]:
SceneParameters[
--------------------------------------------------------------------------------------------------------
Name Flags Type Parent
--------------------------------------------------------------------------------------------------------
projector.active_data ∂ Float Emitter
projector.active_pixels UInt Emitter
sensor.to_world ScalarTransform4d Sensor
sensor.film.data ∂ TensorXf Film
target.silhouette_sampling_weight float PLYMesh
target.faces UInt PLYMesh
target.vertex_positions ∂, D Float PLYMesh
target.vertex_normals ∂, D Float PLYMesh
target.vertex_texcoords ∂ Float PLYMesh
vial_exterior.bsdf.eta float SmoothDielectric
vial_exterior.silhouette_sampling_weight float Cylinder
vial_exterior.to_world ∂, D Transform4f Cylinder
vial_interior.bsdf.eta float SmoothDielectric
vial_interior.interior_medium.scale float HomogeneousMedium
vial_interior.interior_medium.albedo.value.value ∂ Float UniformSpectrum
vial_interior.interior_medium.sigma_t.value.value ∂ Float UniformSpectrum
vial_interior.silhouette_sampling_weight float Cylinder
vial_interior.to_world ∂, D Transform4f Cylinder
]
Reference¶
In its simplest form, the reference is generated by converting the target mesh into a binary occupancy grid. We provide a convenience function to do that:
[10]:
from drtvam.utils import discretize
target = discretize(scene)
Let’s visualize one slice of the target:
[11]:
plt.imshow(target[64], cmap='turbo', interpolation='none')
plt.axis('off')
[11]:
(-0.5, 127.5, 127.5, -0.5)
We do not need the target surface anymore, so we move it far away from the vial so it doesn’t affect performance when rendering:
[12]:
params['target.vertex_positions'] += 1e5
params.update();
Objective function¶
Objective functions are implemented as Loss sub-classes. We will use the thresholded loss function introduced by Wechsler et al [2024]. Parameters are provided as a dictionary, specifying the lower (tl) and upper (tu) thresholds.
[13]:
from drtvam.loss import ThresholdedLoss
loss_fn = ThresholdedLoss({'tl': 0.9, 'tu': 0.95})
Optimizer¶
We now need to define the parameters to optimize, and provide them to an optimizer, which will update them at each optimization step.
All elements in the list above can be modified, and the changes are propagated to the scene via params.update(). The parameter we are interested in optimizing is projector.active_data, which contains the values of all the active projector pixels, currently initialized at 0.
We will use the LinearLBGFS optimizer, which implements the L-BFGS update rule, with a performance optimization based on the consideration that the pattern projection is linear with respects to the patterns. To use it, we need to provide two functions: one to evaluate the objective function, and one to evaluate the gradient.
[14]:
def eval_vol(vars):
params[patterns_key] = vars[patterns_key]
params.update()
vol = mi.render(scene, params, integrator=integrator, spp=spp, spp_grad=spp_grad, seed=it)
return vol
def eval_loss(y):
return loss_fn(y, target)
We can now initialize the optimizer with these functions:
[15]:
from drtvam.lbfgs import LinearLBFGS
opt = LinearLBFGS(render_fn=eval_vol, loss_fn=eval_loss)
Finally, we need to provide it with the parameters to optimize:
[16]:
patterns_key = 'projector.active_data'
opt[patterns_key] = params[patterns_key]
3. Running the optimization¶
We are now ready to run the optimization. At each iteration, we will project the patterns, compute the loss and call dr.backward to backpropagate it to obtain the parameter gradients. The parameters are then updated by the optimizer, and we finally clip potential negative values to 0. We will do that for 40 iterations.
Projecting the patterns is done again with mi.render, with the same arguments. Note that we can provide both spp and spp_grad, which define the sample count for the evaluatin of the forward model and the backpropagation, respectively.
[17]:
spp = 8
spp_grad = 16
for it in trange(40):
# Update scene
params.update(opt)
# Simulate projections
vol = mi.render(scene, params, integrator=integrator, spp=spp, spp_grad=spp_grad, seed=it)
# Evaluate objective function
loss = loss_fn(vol, target)
# Backpropagate
dr.backward(loss)
# Update patterns
opt.step(vol, loss)
# Clip negative values
opt[patterns_key] = dr.maximum(dr.detach(opt[patterns_key]), 0.)
100%|███████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 40/40 [00:16<00:00, 2.41it/s]
4. Visualizing the results¶
We can now evaluate the optimized results. We can start by rendering the final state of the optimization:
[18]:
params.update(opt)
vol_final = mi.render(scene, params, integrator=integrator, spp=64, seed=0)
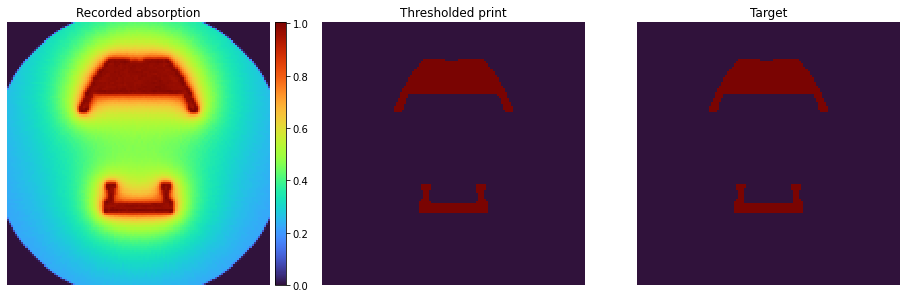
We can now look at the result slice by slice, and compare it with the target:
[19]:
layer = 64
fig = plt.figure(1, figsize=(16, 5))
gs = fig.add_gridspec(1, 3, wspace=0.2)
ax = fig.add_subplot(gs[0])
im = ax.imshow(vol_final[layer], interpolation='none', cmap='turbo')
ax.set_title("Recorded absorption")
cbax = ax.inset_axes([1.02, 0, 0.04, 1], transform=ax.transAxes)
fig.colorbar(im, cax=cbax)
ax.axis('off')
ax = fig.add_subplot(gs[1])
ax.imshow(vol_final[layer] > 0.9, interpolation='none', cmap='turbo')
ax.set_title("Thresholded print")
ax.axis('off')
ax = fig.add_subplot(gs[2])
ax.imshow(target[layer], interpolation='none', cmap='turbo')
ax.set_title("Target")
ax.axis('off')
[19]:
(-0.5, 127.5, 127.5, -0.5)
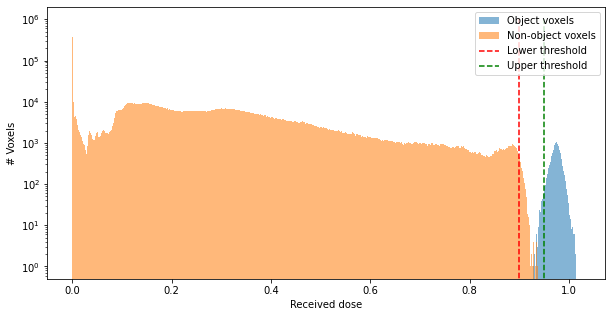
Another useful metric is to look at the histogram of recorded absorption. Ideally, we can observe good separation between object and non-object voxels, which indicates that polymerizing only the object part of the volume is feasible.
[20]:
fig = plt.figure(figsize=(10, 5))
obj_mask = target.numpy().flatten() > 0.
voxels_final = vol_final.numpy().flatten()
bins = np.linspace(0, 1, 500)
plt.hist(voxels_final[obj_mask], bins=500, label="Object voxels", alpha=0.55)
plt.hist(voxels_final[~obj_mask], bins=500, label="Non-object voxels", alpha=0.55)
plt.vlines(0.9, 0, 1e6, linestyle='--', color='red', label='Lower threshold')
plt.vlines(0.95, 0, 1e6, linestyle='--', color='green', label='Upper threshold')
plt.yscale('log')
plt.ylabel("# Voxels")
plt.xlabel("Received dose")
plt.legend()
[20]:
<matplotlib.legend.Legend at 0x7d0ac4c79640>
Finally, we can extract the projector patterns and visualize them:
[21]:
patterns = scene.emitters()[0].patterns()
[22]:
fig = plt.figure(1, figsize=(26, 5))
gs = fig.add_gridspec(1, 5, wspace=0.2)
pattern_count = patterns.shape[0]
for i in range(5):
pattern_id = i * pattern_count // 5
ax = fig.add_subplot(gs[i])
im = ax.imshow(patterns[pattern_id], vmax=7e-3, interpolation='none', cmap='turbo')
ax.set_title(f"{pattern_id}/{pattern_count}")
ax.axis('off')
cbax = ax.inset_axes([1.02, 0, 0.04, 1], transform=ax.transAxes)
fig.colorbar(im, cax=cbax)
[22]:
<matplotlib.colorbar.Colorbar at 0x7d0ab94c8970>
